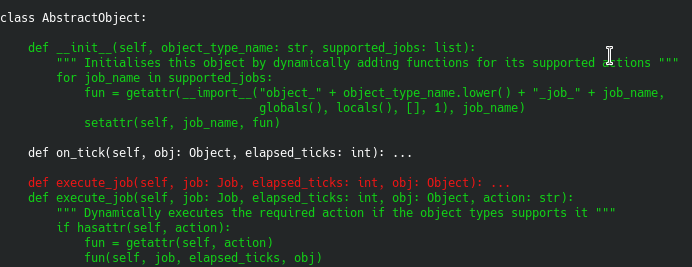
– further implement the food buying mechanic in python (still not complete)
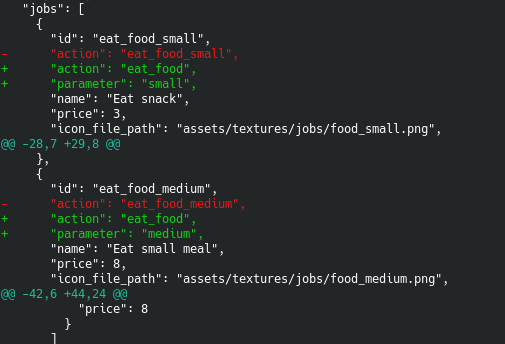
– correct “parameter” parameter passing into python scripts
– add interface to allow python scripts to reduce the funds (buy things)
– fix job type copy constructor (did not initialise all values)
– do not allow values greater than 100 in controllable objects
– add mechanic in the game state/main app that force-refreshes the widgets if the funds changed through a script
Really as it says in the surprisingly in-depth commit message, making good progress!