– Pass on the game state to the respective tick functions as it is needed – Make some functions static that can be static – Some IDE warnings fixed – Add function to get the possible action points of an object
Make the findPath function depend solely on function parameters, not class members
This is part of a refactoring of the path finding code, needed to implement functionality to simply determine if there is a viable path between two coordinates without actually starting to navigate on the path. This is still work in progress.
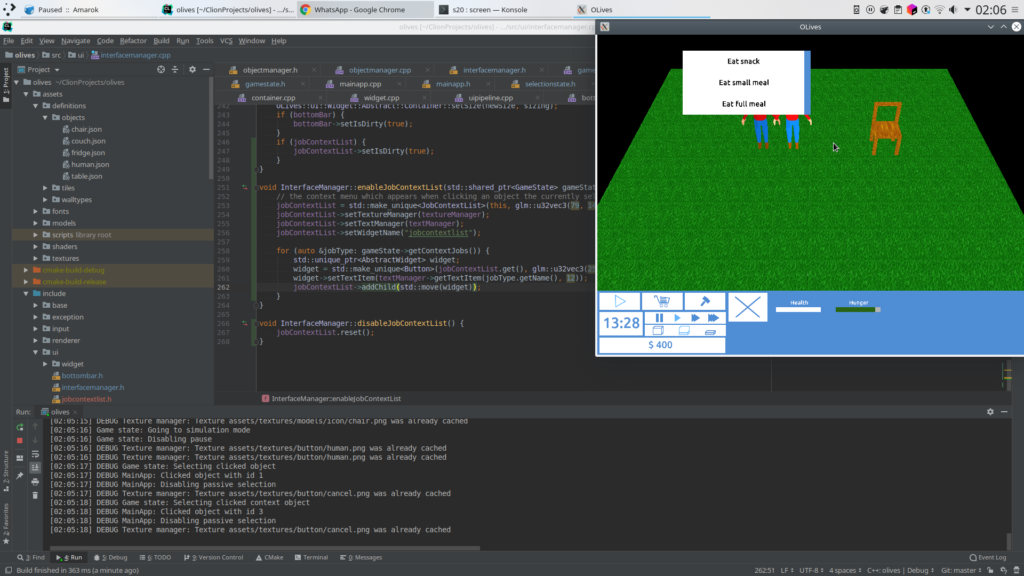
Even though it definitely does not say so, this means that the job context list can now be hidden again without having to actually push one of the buttons. This is also the beginning of adding new jobs when clicking one of the buttons, this is very much work in progress however.
Show available jobs when selecting a context object after selecting a primary object. Introduce the JobContextList to the Interface Manager
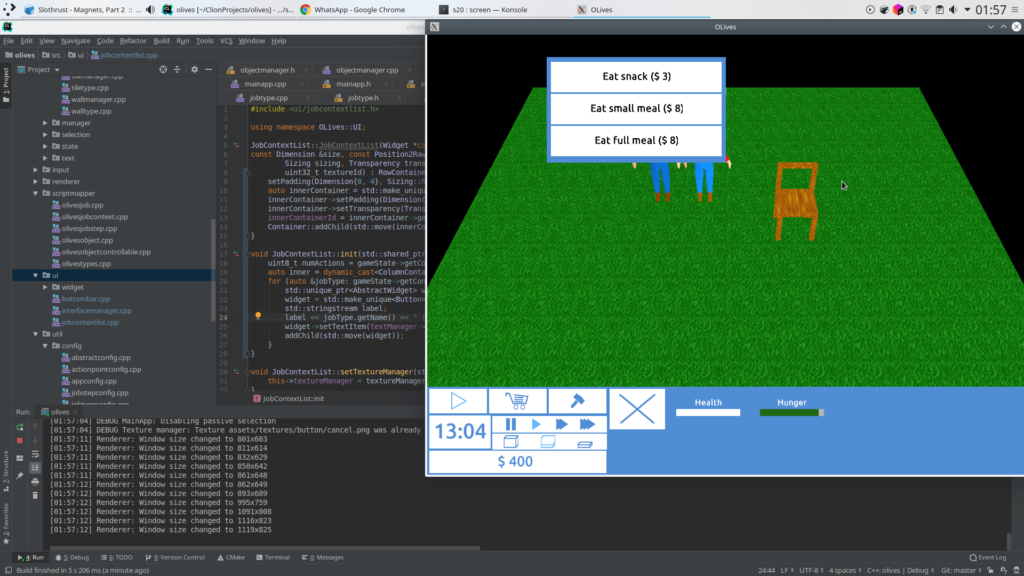
This is a big one. This extends the interface manager to show a list of possible jobs that fulfil the following criteria:
the object being clicked on (“context object”) exposes a list of actions
the currently selected (“primary”) object supports the action required by a job
if the job requires funds, make sure the user’s funds are sufficient
This also meant extending the whole click handling logic for objects had to be re-done and the concept of the “context object” selection had to be introduced. On top of that the JobContextList widget was added, it still looks a little wonky and does not do much except being shown, but here it is:
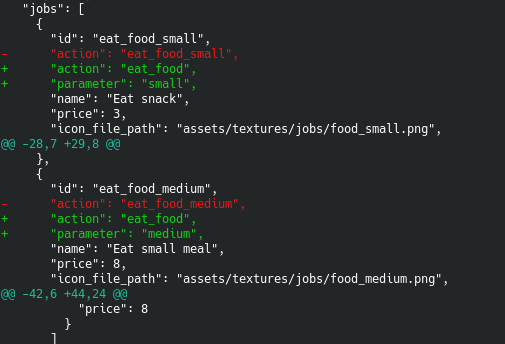
– add new “parameter” property on job types – add new “supported actions” property to object types pass both on to the appropriate python functions and change their signature accordingly
This is properly implementing the aforementioned concept of “supported actions” instead of just hard-coding it. It also adds parameters to the job definitions in order to minimise code duplication. To give a practical example here, look at the definition of the “eat” job in order to see the difference:
Make the job definition more generic and move actual job handlers to separate files
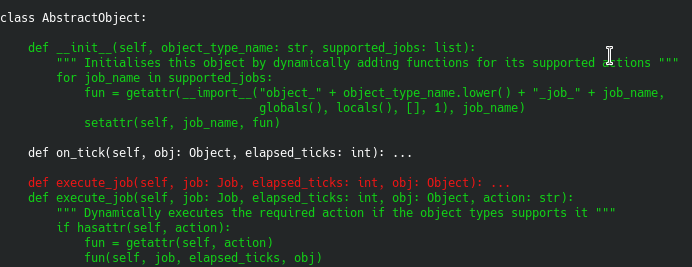
So far all (not like all that much exists yet) the job logic and general object logic were stored in the same file, the implementations for specific tasks no move to separate files. This is realised by iterating over the specified supported actions when instantiating an object (in Python) and dynamically adding the respective functions to the class:
Add configuration information for action points and job type icons
This adds the concept of “action points”, meaning coordinates relative to object’s position (and rotation) with which other objects may interact. Or at least the configuration to store information about them. 🙂 It further adds support for storing a path to a job type icon – neither of these settings is used – yet.